Magnetic-Actuated Flexible Instruments with Enhanced Bending Capability through Magnetic Distribution Optimization
 featured.png
featured.png
Abstract
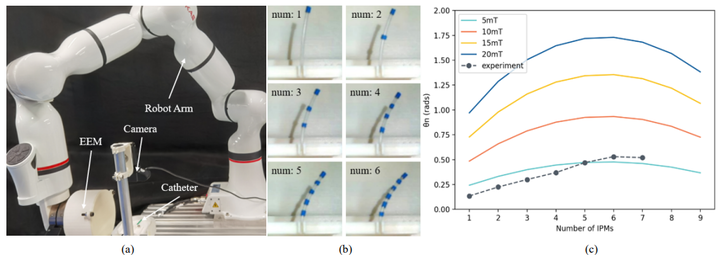
Magnetically-actuated flexible surgical robot has promising applications for ultra-narrow and tortuous orifices. However, maximizing its bending capability and manipulability remains a significant hurdle for clinical use. In this study, we introduce an objective function that can accurately predict a catheter’s bending angle with given numbers of internal permanent magnets (IPMs) under various magnetic fields through iterative calculation. The optimal magnets distribution that yields the maximal controllable bending angle, could be determined by optimizing this objective function. The effectiveness of this method is validated through simulations and experiments. Additionally, we propose a simple control scheme to control the bending angle of the magnetically-actuated catheter based on the piecewise constant curvature model. The experimental results demonstrate that the proposed method significantly improves the motion accuracy of the catheter. The catheter with the optimized magnet distribution achieved superior tracking performance with an Integral Absolute Error (IAE) of 1.08 rad∙s and maximal controllable bending angle of 150°.
Mingcong Chen
Joint PhD Student in The City University of Hong Kong (CityU) and Centre for Artificial Intelligence and Robotics (CAIR) Hong Kong Institute of Science & Innovation, Chinese Academy of Sciences (HKISI-CAS).
Currently I am a joint PhD student in CityU and CAIR with research interests in medical robotics and embodied AI.