An Ultra-fast Intrinsic Contact Sensing Method for Medical Instruments with Arbitrary Shape
 featured.png
featured.png
Abstract
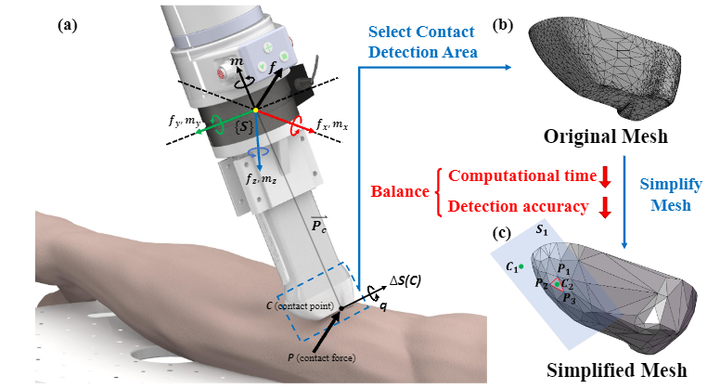
Intraoperative contact sensing has the potential to reduce the risk of surgical errors and enhance manipulation capabilities for medical robots, particularly in contact force control. Current intrinsic force sensing (IFS) methods are limited in application to medical instruments with arbitrary shape, due to high computational time and reliance on surface equations. This study presents an ultra-fast IFS method that uses multiple planes to establish surface geometry descriptions. The method can reduce high-order contact mechanical models that need to be solved iteratively to a set of linear equations, and calculate contact location analytically. In addition, a robot motion control approach based on the contact sensing method is proposed to maintain stable contact force and regulate the probe’s orientation for robotic ultrasound systems (RUSS). Experimental results show that the contact sensing method is robust to friction and can achieve a mean ($\pm$SD) displacement error of 1.04$\pm$0.43 mm in contact location with computational time less than 1 ms. The system has been evaluated on a phantom with sinusoidal motion. To the best of our knowledge, this is the first study to validate adaptiveness of RUSS under dynamic conditions. The results demonstrated that the system exhibits comparable manipulation capabilities to human operators with only force sensing, indicating a high level of adaptiveness.
Mingcong Chen
Joint PhD Student in The City University of Hong Kong (CityU) and Centre for Artificial Intelligence and Robotics (CAIR) Hong Kong Institute of Science & Innovation, Chinese Academy of Sciences (HKISI-CAS).
Currently I am a joint PhD student in CityU and CAIR with research interests in medical robotics and embodied AI.