 featured.png
featured.png
Abstract
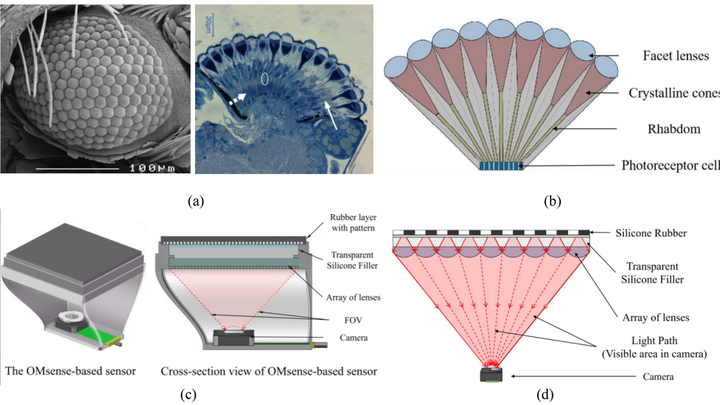
Imitating the tactile sensory system of human and providing skin-like artificial sensing functions to robotic systems will enable them to interact with unstructured environment safely and efficiently. The vision-based method can achieve soft tactile sensing by the internal visual measurements and the conversion from deformation of an elastomer to haptic information. However, how to reduce the high requirements on both the pixel density of the images and the deformation quantity of the elastomer remains an open issue. Inspired by the compound eyes of the insects, a novel tactile sensing principle, the OMsense sensing principle, has been investigated. Arrays of lenses, acting as the facet lens in compound eyes, have been used for deformation magnification so that the required image pixels and the deformability of the elastomer can be significantly reduced. The contact shape and multiaxis force sensing relies on the soft silicone layer with designated pattern corresponding to the selected lenses. The OMsense has demonstrated high accuracy and low crosstalk in measuring all tactile information. Based on current sensor design, the resolution of normal force, shear force, and torque sensing was found to be 0.2 N, 0.5 N, and 0.003 N ⋅ m, respectively. In OMsense, small and high sample rate image sensors with thinner and stiffer soft sensing layer can be used, which is particularly suitable for miniaturized three-dimensional structures.
Mingcong Chen
Joint PhD Student in The City University of Hong Kong (CityU) and Centre for Artificial Intelligence and Robotics (CAIR) Hong Kong Institute of Science & Innovation, Chinese Academy of Sciences (HKISI-CAS).
Currently I am a joint PhD student in CityU and CAIR with research interests in medical robotics and embodied AI.