A Robotized Soft Endoscope with Stereo Vision for Upper Gastrointestinal Endoscopic Submucosal Dissection (ESD)
 icra2023.png
icra2023.png
Abstract
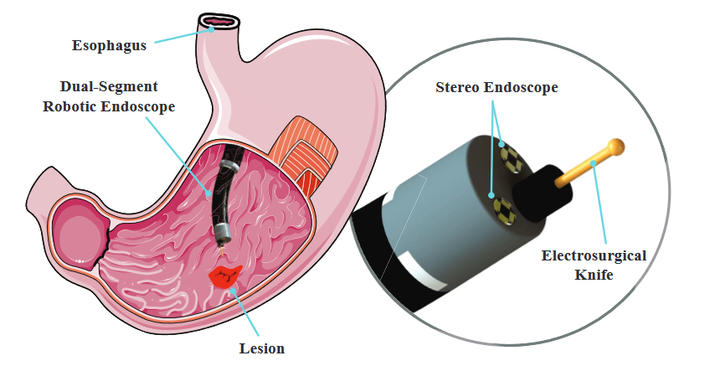
This work presents a novel dual-segment flexible robotic endoscope designed to enhance reachability and dexterity during ESD surgery. The proposed system is capable of executing multi-angle cutting operations at a small angle relative to the lesion surface, allowing for efficient en-bloc resection. Additionally, the system incorporates two calibrated RGB cameras and a depth estimation algorithm to provide detailed 3D information of the tumour, which is used to guide the control framework. A stereo visual servoing controller is also implemented to improve path-following performance during surgery. Experiments results indicate that the proposed system improves motion stability and precision. The root means square error (RMSE) of circle path following is 1.1991mm with a maximum of 1.4751mm. Ex-vivo testing demonstrates its significant potential for use in endoscopic surgery.
Mingcong Chen
Joint PhD Student in The City University of Hong Kong (CityU) and Centre for Artificial Intelligence and Robotics (CAIR) Hong Kong Institute of Science & Innovation, Chinese Academy of Sciences (HKISI-CAS).
Currently I am a joint PhD student in CityU and CAIR with research interests in medical robotics and embodied AI.