 icra2023.png
icra2023.png
Abstract
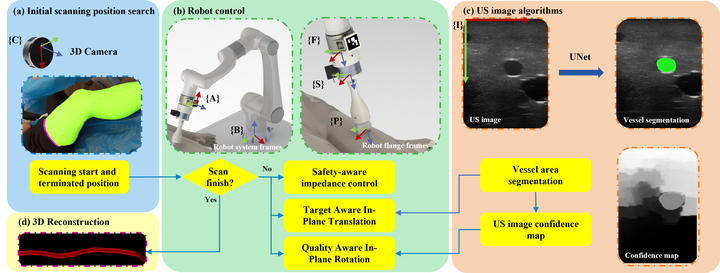
Current imaging of the artery relies primarily on computed tomography angiography (CTA), which requires contrast injections and exposure to radiation. In this paper, we present a method for fully autonomous artery 3D image acquisition using a linear ultrasound (US) probe and a 6 DoFs robot arm with a 3D camera. Robotic vessel acquisition can minimize tissue deformation and permit the reproduction of scans. Additionally, the robotic-based acquisition can provide more precise vessel position data that can be utilized for 3D reconstruction as a preoperative image. The first scanning point is determined by the 3D camera using a neural network for leg area estimation. A visual servo algorithm adjusts the in-plane motions using a cross-sectional vessel segmentation produced by a neural network with a UNet structure, while a US confidence map regulates the in-plane rotation. The robot is equipped with impedance control to maintain a constant and safe scan. Experiments on a leg phantom and a volunteer indicate that the robot can follow the vessel and modify its position to provide a sharper US image. The average error of phantom scanning in y-axis and z-axis are 0.2536mm and 0.2928mm, respectively, while the root means square error (RMSE) of contact force in the volunteer experiment is 0.2664N. In addition, a 3D vessel reconstruction demonstrates the possibility of robotic US acquisition as a preoperative image.
Mingcong Chen
Joint PhD Student in The City University of Hong Kong (CityU) and Centre for Artificial Intelligence and Robotics (CAIR) Hong Kong Institute of Science & Innovation, Chinese Academy of Sciences (HKISI-CAS).
Currently I am a joint PhD student in CityU and CAIR with research interests in medical robotics and embodied AI.